Projetos
-

Este projeto tem como objetivo o desenvolvimento de plantas de controle em ambiente de simulação (numérica e gráfica) que possam ser utilizadas para testar diferentes estatégias de controle e sejam de fácil acesso.
A ideia aqui é utilizar a engine de jogos Unity para a representação gráfica do comportamento de sistemas dinâmicos. A simulação numérica do comportamento dos sistemas de controle é implementada em C# de modo que todo o desenvolvimento seja feito no próprio Unity.
Créditos:
- Pêndulo Invertido Sobre um Carrinho
- Guilherme Baumgratz Figueiroa (bolsista próativa/UFOP) - Biblioteca de simulação de sistemas dinâmicos em C#
- Lucas Faria Antunes (monografia de TCC - Eng. Elétrica/UFOP) - Modelagem e Controle do Sistema; Versão Gráfica Inicial
- Víctor Costa da Silva Campos - Coordenação
- Pêndulo Invertido Sobre um Carrinho
-
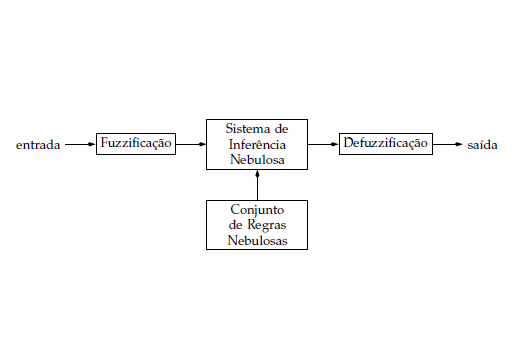
Sistemas nebulosos Takagi-Sugeno (TS) tem sido amplamente estudados nas últimas três décadas, principalmente devido à propriedade de serem capazes de representar exatamente uma classe bastante genérica de sistemas não-lineares dentro de um compacto do espaço de estados.
Apesar de serem utilizados de forma bastante ampla, o uso de sistemas nebulosos pode ser classificado de três formas na área de controle:
- Sistemas Especialistas - Traduzindo um conhecimento prévio na forma de variáveis linguísticas
- Aproximadores Universais - Aproximando com um certo erro funções desconhecidas no sistema de controle
- Representações politópicas - representando sistemas não lineares como a combinação convexa (dependente do estado) de sistemas lineares
-
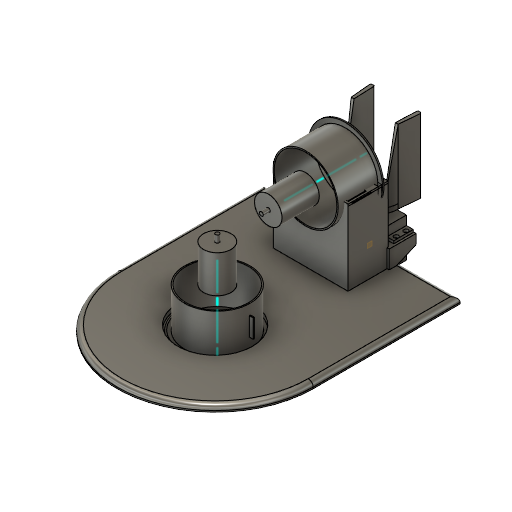
Este projeto tem como objetivo o desenvolvimento de um Hovercraft em escala que possa ser utilizado como uma plataforma móvel para o ensino e testes de diferentes estratégias de controle, além de ser uma forma interessante de apresentar diversos conceitos de automação e redes de comunicação.
Monografia sobre o desenvolvimento do projeto
Modelo desenvolvido no Fusion 360
Vídeos de testes do protótipo desenvolvido:
Créditos:
- Pedro Ivan Ribeiro Fernandes - Desenvolvimento
- Víctor Costa da Silva Campos - Orientação